
本案例用Adams模擬模型驗證與實體D-RAPS機器人的結果
Adams模型的機器人不僅可以應用於包裝折疊,還可以廣泛應用於其他各種機器人領域。
消費性產品的公司不斷地開發創新的包裝方式。這個產業競爭激烈,開發時間必須越來越短,成本也需要不斷降低。在高品質的糖果市場中,包裝更是扮演著至關重要的角色,許多製造商會設計精緻的紙盒,這些紙盒的摺疊工序複雜,甚至可以與摺紙藝術相媲美。
這類包裝多數並非使用膠水固定,而是透過巧妙的插片設計完成。紙盒在摺疊過程中需要設計出能互相嵌合的插片和插槽,讓整個包裝穩固成型。由於這些複雜的包裝結構難以以自動化機器完成,因此傳統上大多由人工操作製作。此外,要開發能處理這些精密摺疊工序,並能靈活適應新包裝設計的自動化機器,也是一項極具挑戰性的技術。
挑戰
在設計紙盒與包裝設備時,最大的挑戰之一就是理解紙盒在摺疊過程中的行為。紙板由多層壓合材料構成,每一層都具有高抗拉剛性和低抗壓剛性的特性。當相鄰的面板沿著摺痕進行旋轉時,外層會被拉伸,而內層則會受到壓縮,如圖1所示。
任務1 – 插入固定
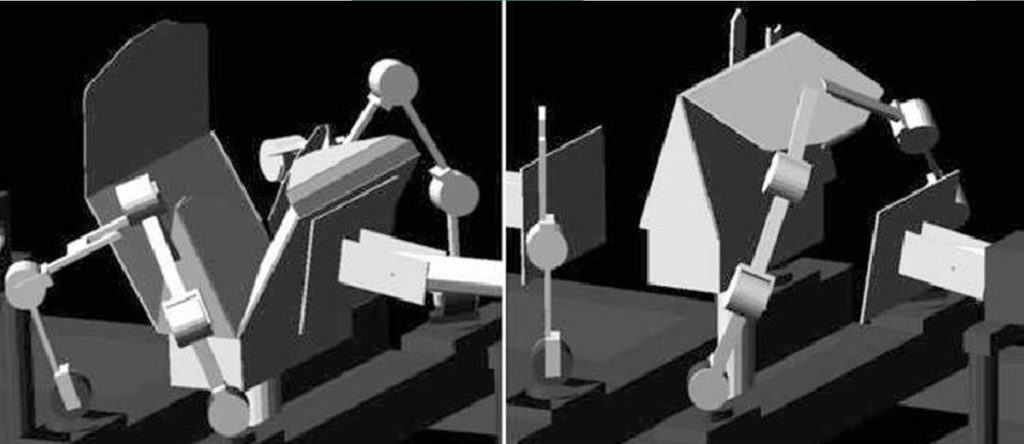
插入固定這個步驟,也就是將蓋子的末端插入一個狹縫中以固定,是紙盒摺疊過程中最複雜的環節。這個步驟之所以困難,是因為蓋子由三個連結部分構成,其運動學必須被精確掌握,才能成功將末端插入小縫中。如圖 2 所示,這是一個相對簡單的紙盒插入固定的過程。首先,機械手指如圖a所示,摺疊蓋子的第一部分,接著如圖b所示,壓折末端摺痕。插入固定的動作如圖c所示,完成的包裝狀態則如圖d所示。這項複雜的操作對於熟練的人來說可以輕鬆完成,但要將這個過程自動化,並讓機械設備能順利完成,則是更大的挑戰。
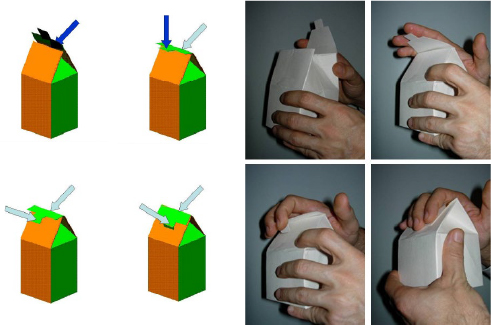
a) 第一片摺翼的折疊,
b) 第二片摺翼的折疊,
c) 第三片摺翼的折疊,
d) 第三片摺翼的折入動作。
解決方案與驗證
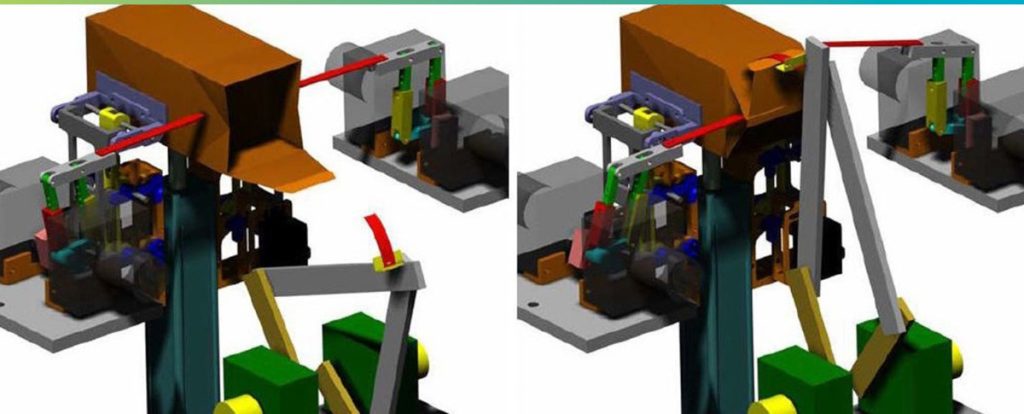
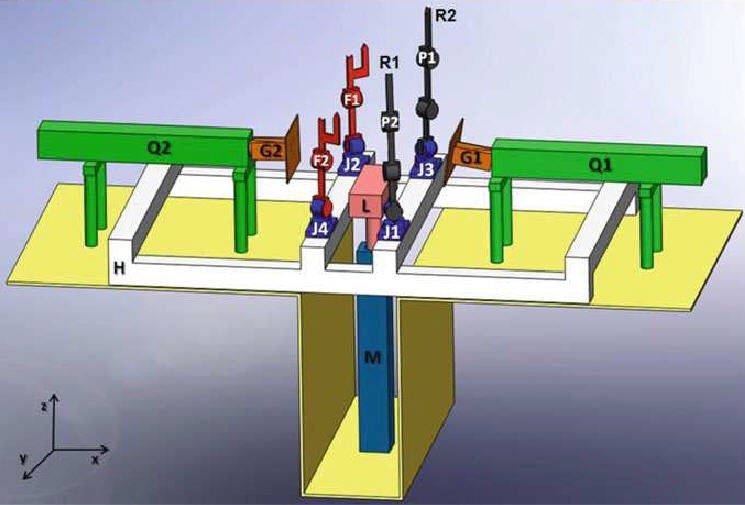
IIT 工程師製作了紙盒與機器人的 Adams 模型,來展示如何完成摺疊操作。該機器人配備三根手指,每根手指具有兩個自由度,其佈局如圖 3 所示。中央的手指在基座處提供偏航(yaw)運動,並在接下來的兩個關節上提供俯仰(pitch)運動。而側邊的兩根手指僅具有俯仰運動,因此它們可以在平面上移動。機器人的每個運動元件都以運動學方式與紙盒模型相連,以實現紙盒的摺疊操作。這是透過使用 Adams 軟體開發手指的逆向運動學解決方案來完成的。最終計算出的關節角度被輸入到多體旋轉與線性致動器中,從而驅動模擬運行。
任務 2 – 摺紙式紙箱摺疊
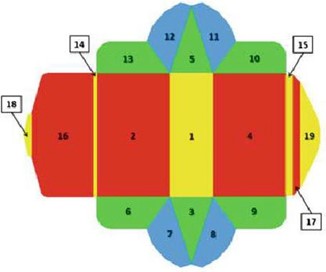
相較之下,自動化摺疊機器通常被用於大量生產的簡單包裝。然而,消費品公司希望將複雜的包裝設計轉為自動化生產,以提升品質並減少因重複性動作所導致的工傷風險。但傳統的自動摺疊機器在適應新設計時非常困難。因此,業界正致力於開發基於可編程機器人的靈活自動化系統,這些系統能處理複雜的包裝,並且只需要透過更改軟體就可以適應新的設計。倫敦國王學院的戴建生教授(Prof. Jian S. Dai)開發了一套靈巧可重組裝配與包裝系統(D-RAPS),作為紙箱摺疊測試平台,用於評估機器人在複雜包裝作業中的應用,如圖 4 所示。

研究結果
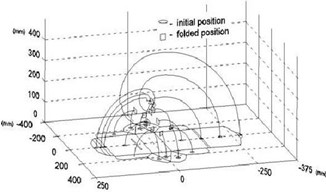
「手指的物理位移與機器人的實際位移高度吻合。」義大利技術研究院(IIT)高級機器人部門旗下先進工業自動化實驗室負責人Ferdinando Cannella表示:「摺疊模型的紙箱摺疊序列也與機器人的實際操作完全一致。透過Adams模擬模型驗證與實體D-RAPS機器人的結果相符,研究人員現在可以利用模擬模型來評估不同的摺疊方式以及新的包裝設計,而不需要直接使用實際的機器人進行測試。
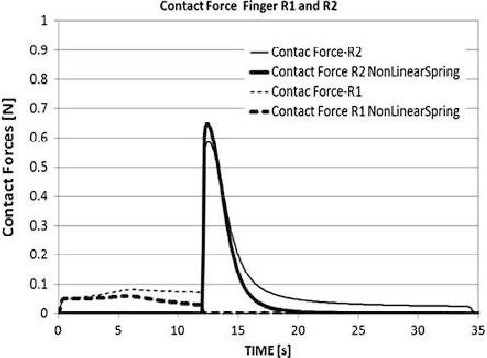
其中最重要的成果之一是我們成功計算了實體原型上無法測量的接觸力,因為接觸點太小,無法安裝壓力或力感測器,且馬達的類型也不適合這種功能。這是一個巨大的突破,因為許多學生都使用這台機器人進行研究,因此要安排使用實際機器人的時間通常非常困難。由博士候選人Mariapaola D’Imperio所建立的Adams機器人模型,不僅能應用於包裝摺疊,還可擴展至多種其他機器人的應用領域。
此外,IIT與倫敦國王學院的研究人員也正在努力將柔性材料引入模擬模型中,這將進一步提升模擬的精準度,並使得模擬更加複雜的摺疊操作成為可能。」
關於義大利科技研究院
義大利科技研究院(IIT)是一個由義大利教育、大學與研究部以及經濟與財政部共同成立的基金會,旨在推動基礎研究與應用研究的卓越發展,並促進義大利的經濟成長。IIT的主要目標是創造並傳播科學知識,同時提升義大利在科技領域的競爭力。為了實現這兩大目標,IIT將與學術機構和私人企業合作,透過這些夥伴關係推動科學發展、技術創新以及高科技領域的人才培育。
原文內容: Adams used to simulate complex package folding machinery