
用於駕駛模擬應用的完整工具鏈
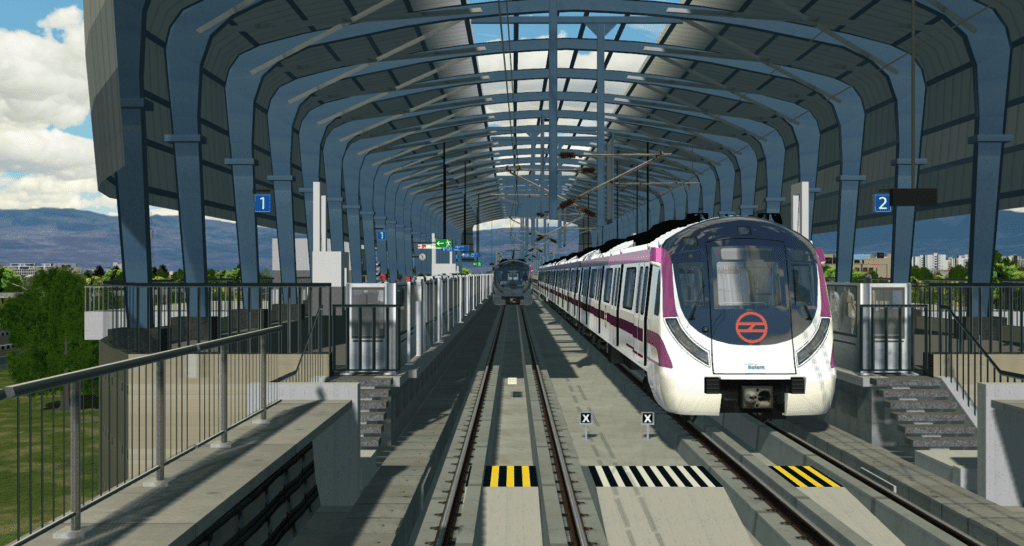
VTD是我們的工具集,基於公路和鐵路的模擬範圍內建立、配置、演示和評估虛擬環境。用於開發ADAS和自動駕駛系統以及訓練模擬器的核心。涵蓋的全部範圍從 3D 內容的生成到複雜交通場景的模擬,最後,到簡化或物理驅動感測器的模擬。VTD用於 SiL、DiL、ViL 和 HiL 應用,也可以作為包括第三方或客制化在內的聯合模擬。因為VTD開放和模組化的設計,很容易與其它軟體對接和整合。
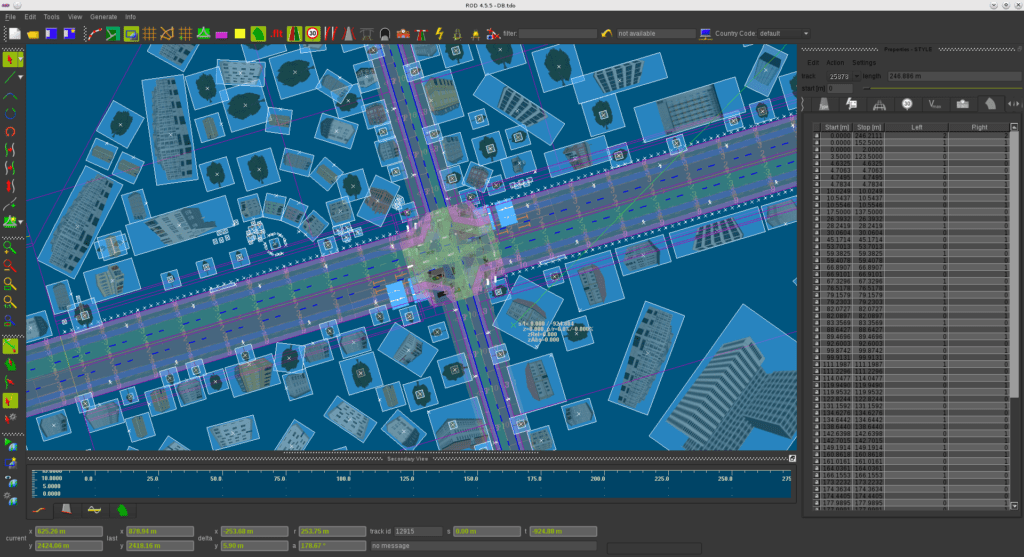
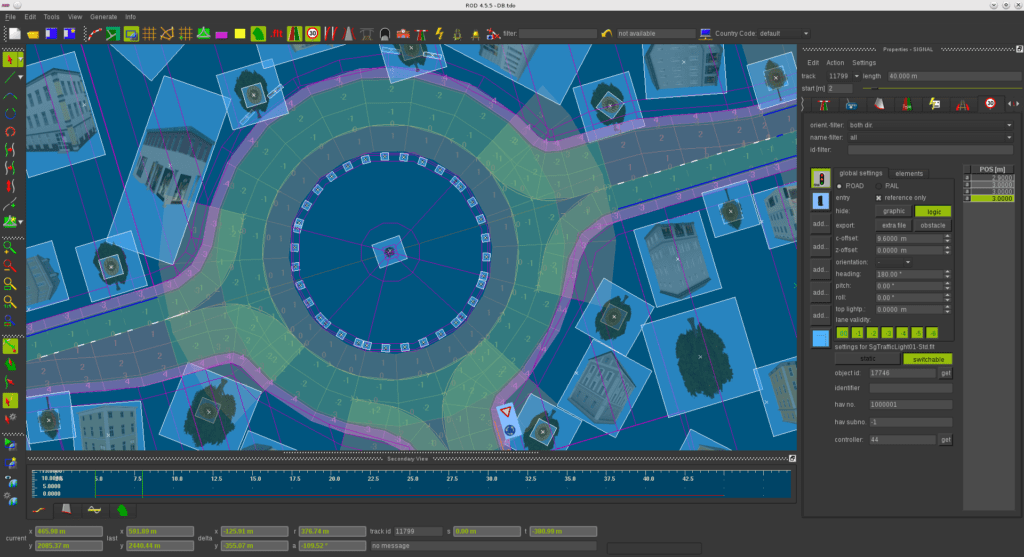
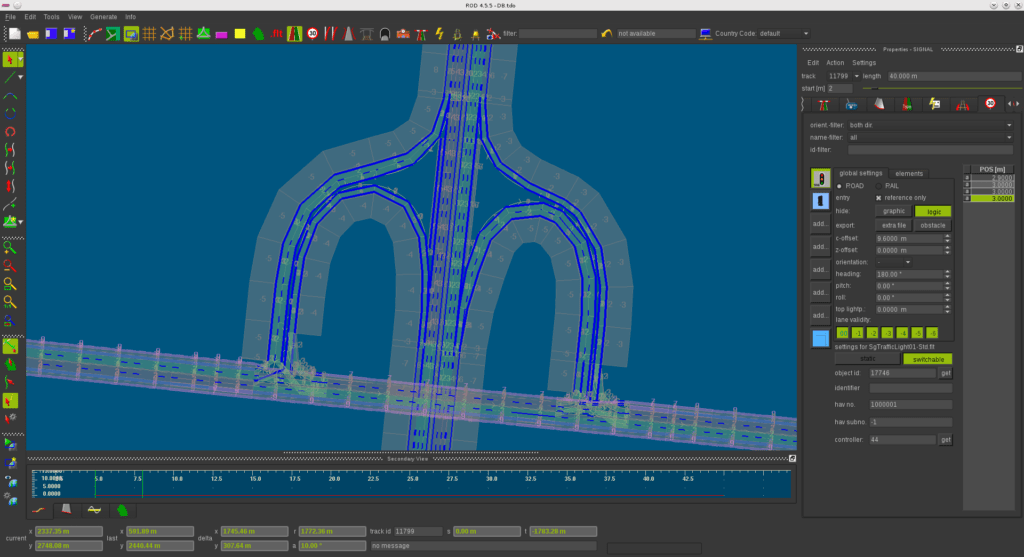
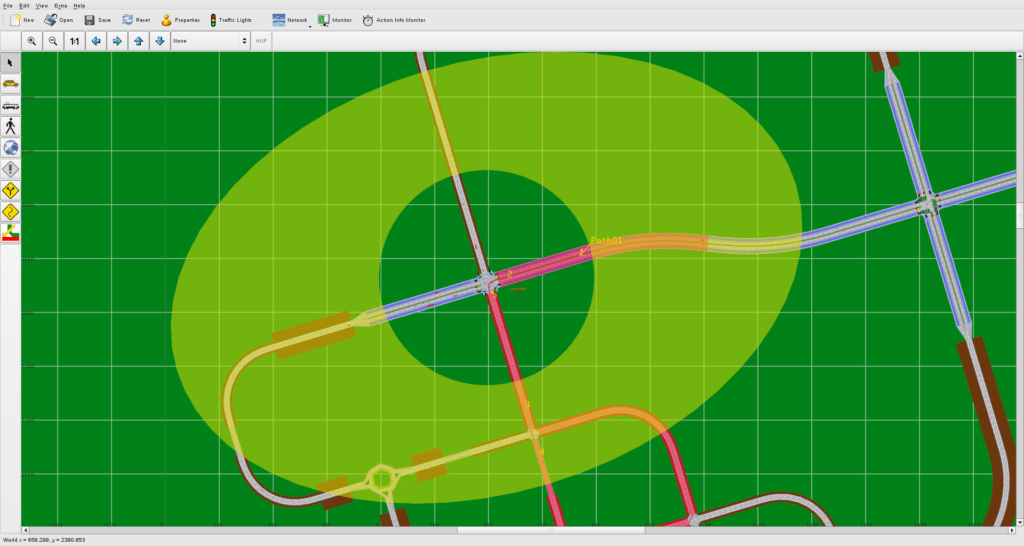
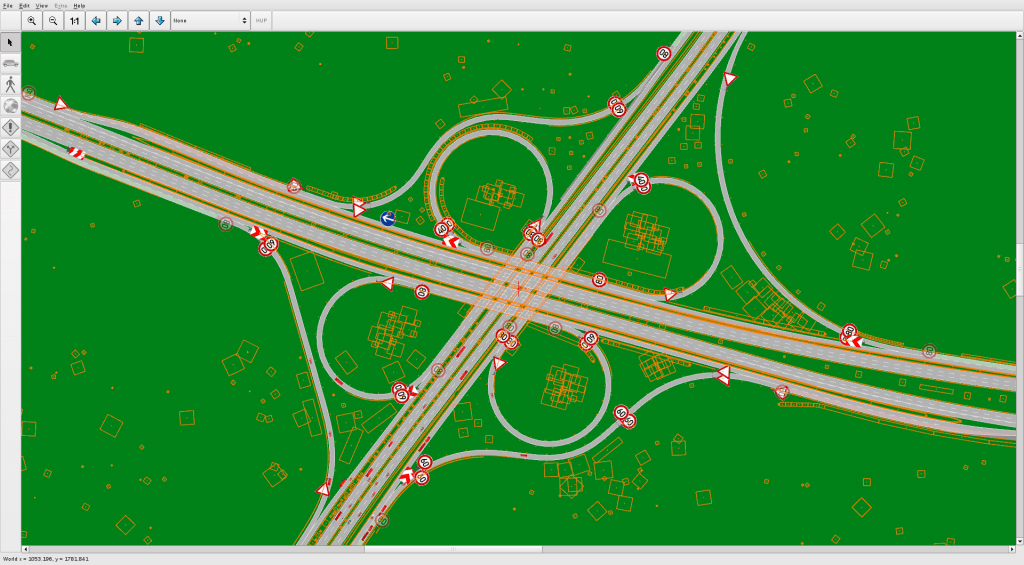
建立虛擬世界
VTD交互式的道路網路編輯器 (ROD)可以使用無限數量的車道、複雜的十字路口和全面的標誌&信號,來詳細設計道路和鐵路的網路。ROD從單一的來源,一致地連接和匯出邏輯和圖形數據。
虛擬世界可以從頭開始設計,也可以從現有的數據資料庫圖塊中做編譯。各種匯入和匯出格式,以及 3D 模型和國家的特定標誌/信號的大型資料庫,讓整個建立的過程更快速。
所有logics data都按照OpenDRIVE®的格式輸出。 OpenCRG®的資料可以連接到資料庫。圖形資料可以客制化輸出。
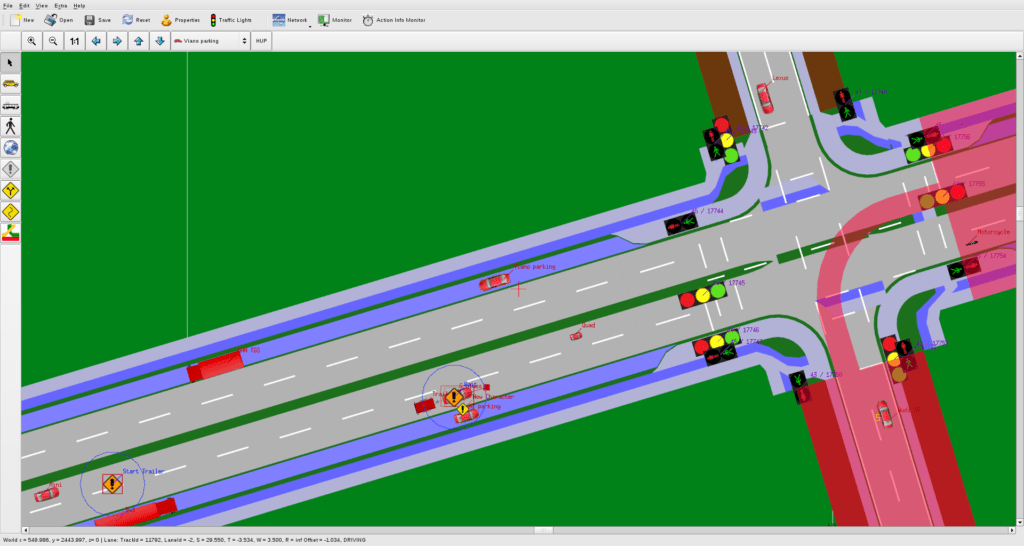
虛擬世界的配置
動態內容是以交互式場景編輯器來定義的。它將底層 OpenDRIVE® 資料庫可視化,可以將交通流量指定為各個物體和圍繞關鍵實體的自主自駕車群。左手和右手駕駛的環境都支援。這個龐大的車輛、行人和駕駛員屬性資料,可以輕鬆、客製化的做設定。只需按幾下滑鼠,用戶就可以為單個實體定義路徑、配置訊號控制程式、放置物體,並從大量行動中增加事件。
在模擬階段,支援即時監控和命令輸入。自 2018 年,提供對OpenSCENARIO 的原生支持。
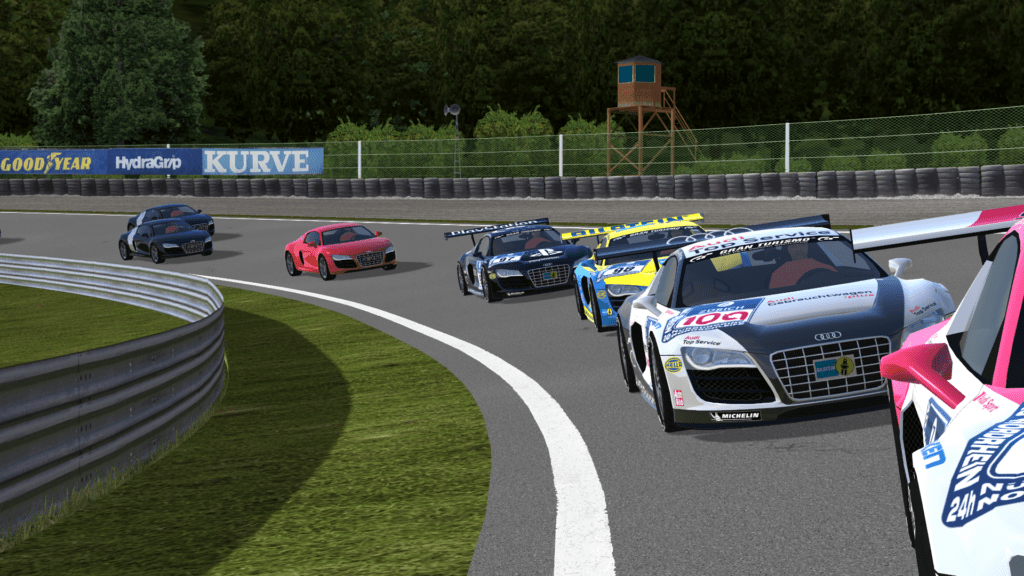
虛擬世界的模擬
無論您在什麼環境中運行 (XiL)、您的時間基是什麼樣子(即時或非即時)或涉及哪些附加組件(聯合模擬)-VTD 都能無縫接軌般地適應這些設定。在任何時候,使用者都能完全控制模擬的執行,指定不同的時間步長,並透過介面的整個範圍(網路、共享內存等)使用物體、圖像和感測器數據。可以注入任意數量的外部計算實體,並且多個安裝可以並行運行或相互連接。VTD可以在一台電腦上上運行,也可以在完整的HPC環境中運行。




客製化虛擬世界
VTD是一種開箱即用的解決方案,但並不局限於此。用戶可以在各個級別上自定義VTD。我們提供 SDKs 以及用於感測器模擬(基於對象列表和物理)、動態模擬和圖像生成的現成模板。用於運行時數據和模擬控制的開放式介面可以輕鬆地將VTD整合到任何環境中。 VTD在Linux系統上運行,並且透過廣泛使用網路介面-不僅是模組化,而且具有極強的可擴展性。



