
使用Hexagon的虛擬測試駕駛(VTD)軟體,在虛擬環境中模擬LiDAR感測器的測量過程,並進行感測器模型的驗證。
這篇文章原文內容 By Alexander Schaermann and Timo Hanke, Data Engineers, BMW Group。
隨著近年來感測器技術和資料處理演算法的進步,自動駕駛系統在提升駕駛者和乘客的安全與舒適度方面取得了重大進展。然而,由於自駕技術的複雜性,如何確保並驗證自動駕駛系統在公共使用時的安全性,依然是一大挑戰。

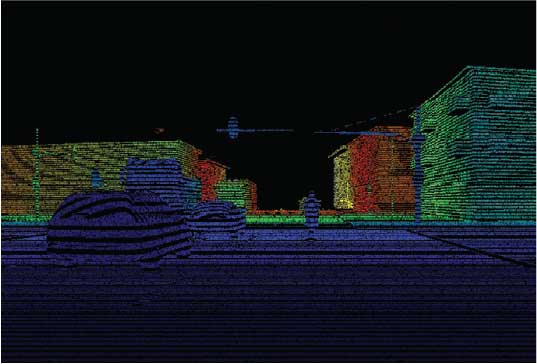
虛擬世界提供了一個合適、安全且可控的環境,來處理所需測試與驗證工作的重要部分。選擇適當的情境以及生成與現實高度相符的虛擬感測器數據,是虛擬開發方法成功的關鍵之一。虛擬感測器數據是透過感測器模型生成的,而這些模型是虛擬環境感知的核心組成部分(見圖1)。這些感知數據是自動駕駛系統決策演算法的主要輸入來源之一。因此,感測器模型的精確性決定了虛擬開發與測試的可行性與有效性。
一般來說,感測器模型可以分為兩種類型:
- 感測器誤差模型:這種模型主要是模擬感測器在測量和感知時,所產生的誤差的統計特性,也就是感知值與真實值之間的偏差。
- 感測器測量模型:這類模型則是基於測量過程的物理描述,依據虛擬場景生成低階測量數據。在機器人研究中,這類模型常用於各種感測器,而在汽車感測器方面,這類測量模型還在逐步發展中。
在這篇文章中,我們介紹了一種汽車LiDAR感測器的測量模型,以及Hexagon的虛擬測試駕駛(VTD)軟體。這個模型是基於光線追蹤的方法來模擬測量過程。這樣的做法讓我們能夠在汽車駕駛模擬器的框架內即時生成LiDAR點雲。透過將實際道路測試的數據與虛擬環境中感測器模型生成的數據直接比較,我們可以使用適當的指標來量化感測器模型的準確性和有效性。
感測器測量模型
A. 駕駛模擬器中的即時光線追蹤
我們考慮的是汽車工業中常用的掃描型LiDAR感測器。這種感測器透過測量雷射脈衝反射到目標表面的時間來確定距離。其角解析度是透過掃描來達成的,也就是將發射的雷射光束和光學檢測陣列的選擇性視野逐步移動到感測器的完整視野。大多數目前市面上的系統都使用機械旋轉鏡來進行掃描。這種感測器的運作原理非常適合使用光線追蹤技術來建模。我們所提出的感測器模型的虛擬環境是由VTD駕駛模擬軟體提供的(如圖2所示),該軟體基於NVIDIA OptiX光線追蹤引擎提供光線追蹤框架。
B. 虛擬點雲生成
為了模擬LiDAR感測器的光束傳輸、反射和檢測,感測器測量模型的攝影機程序會為每組方位角和仰角生成一條光線。如果獲得有效的距離測量,就會形成一個點雲(詳情請參考參考文獻1)。
感測器模型驗證
A. 驗證方法
為了驗證第二節中描述的LiDAR感測器模型,我們提出了如圖3所示的程序。這個方法是基於真實數據與合成數據的比較。在第一步中,我們使用配備LiDAR感測器、差分全球定位系統(DGPS)以及在ROS(中介軟體)中運行的環境模型算法的實驗車輛來捕獲真實數據,並包括佔據網格的實作。接著,我們利用第二節中描述的LiDAR感測器模型,生成合成數據,並使用與實驗車輛相同的佔據網格實作,但提供的是來自VTD感測器模型的模擬數據。為了在模型與ROS之間進行數據交換,我們使用了開放模擬介面(OSI)。當真實數據和合成數據捕獲完成後,我們在驗證框架中使用Matlab進行兩步驟的數據評估。在第一步中,我們直接比較真實感測器數據與模型輸出。第二步則是比較使用真實與合成LiDAR數據生成的佔據網格,這些網格代表了測試車輛的靜態環境。
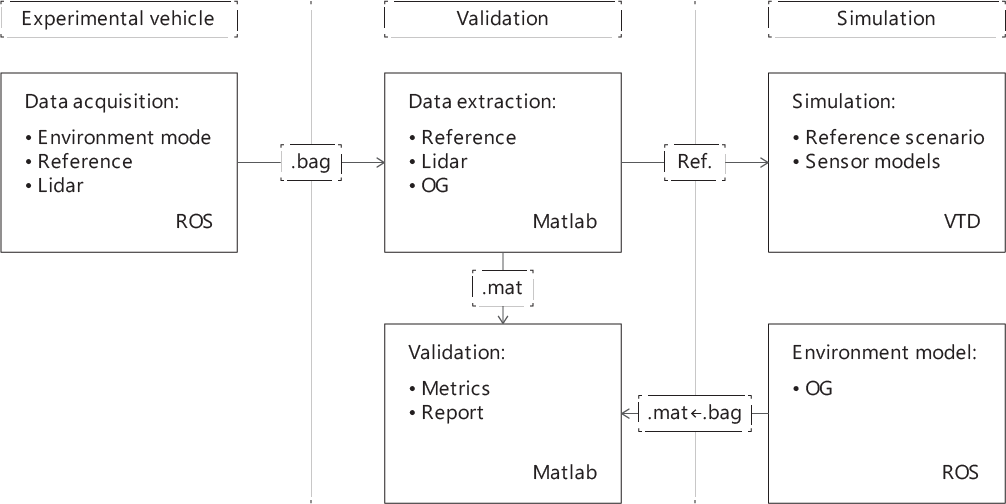
這樣的流程讓我們能夠更精確地驗證LiDAR感測器模型的效能,確保在各種環境下的可靠性。
B. 驗證前提
為了驗證感測器模型,我們評估了一個靜態場景(見圖4)。在這個示意圖中,兩輛車Ego(E)和Target(T)之間的距離約為D1 = 40公尺。這個區域被建模為一個虛擬3D模型,特別針對幾何尺寸和位置有著高精度需求的模擬器。透過這個場景,我們展示如何測試LiDAR感測器的幾何配置,以及不同配置如何影響生成的點雲和佔用網格。

在這項研究中,我們應用了兩種不同的感測器配置,SC1和SC2。SC1使用笛卡爾取樣網格來生成光線,如圖5(a)所示;而SC2則使用球形網格,如圖5(b)所示。一般來說,為了生成影像,需要用光線追蹤技術生成線性分布的光線,因此SC1的做法會是正確的選擇。
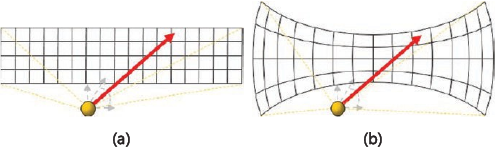
然而,由於LiDAR感測器的光束偏折幾何形狀會導致點雲呈現錐形,因此球形取樣網格更適合用於這種目的。
C. 數據評估
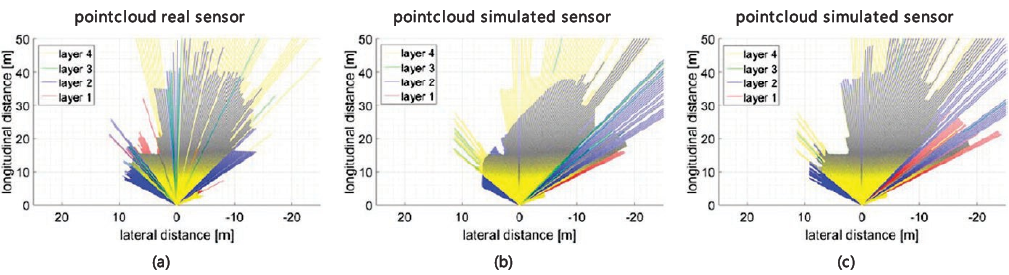
a. 我們從質性檢查開始調查,觀察圖6中顯示的點雲。從視覺上來看,實際的點雲與由感測器配置2(SC2)生成的點雲相比,顯然更為相似,而與感測器配置1(SC1)差異較大。
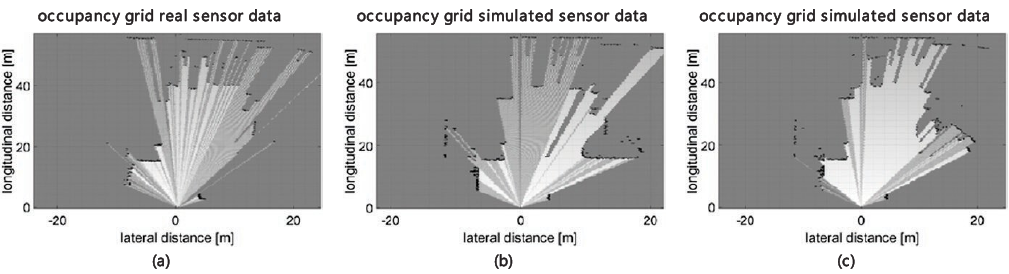
b. 如前所述,佔用網格被用作感測器模型驗證的抽象層級。在這裡,我們另外使用掃描網格(SG)作為進一步的抽象層級。掃描網格是從點雲生成的佔用網格的單次拍攝記錄,而佔用網格則是隨時間累積的掃描網格。
為了評估環境模型輸出,我們重新模擬真實世界的情境,並使用來自兩種感測器配置的通用點雲計算掃描網格和佔用網格。掃描網格的結果顯示在圖7中。從視覺上比較兩種感測器配置的掃描網格表示與實際數據,我們可以看到實際掃描網格與來自SC2的掃描網格之間有較高的一致性。為了量化這個觀察結果,我們應用了三個指標,並在表I中進行了總結。與點雲評估的定量結果類似,這些數值顯示出實際掃描網格與來自SC2的掃描網格相比於SC1有較低的整體誤差和較高的相關性。
總結與未來工作
在這篇文章中,我們提出了一種基於光線追蹤方法的汽車LiDAR感測器物理驅動測量模型。這個模型被用來在虛擬環境中,透過VTD,忠實地重現完整的感測器處理鏈。此外,我們在虛擬環境中重現了一個完整的處理鏈,從低階感測器數據開始,到整個自動駕駛系統的第一階段融合為止。透過這個設置,我們可以評估真實的駕駛情境,並在模擬中重建這些情境,無論是靜態還是動態場景。作為示例,我們展示了一個停車場的靜態情境,並能夠量化自動駕駛功能的輸入,即內部環境表現,如何在真實世界場景與模擬之間匹配,使用原始數據LiDAR感測器模型和適當的驗證指標。本文中的結果顯示,使用具有球形光線追蹤取樣網格的感測器模型,真實數據與合成數據之間的相關性更高。
原文內容: BMW Group generation and validation of sensor models for automated driving systems using VTD
