
本案例工程師用Adams和MSC Nastran來模擬四足機器人的性能
本文內容來自Italian Institute of Technology (IIT)的案例,原文內容擷取重點寫在這裡。
在台灣,當發生地震或爆炸導致建築物倒塌,或是任何災難發生時,搜救隊伍必須在艱難的地形中穿梭,努力尋找生還者。這項工作需要高度專業的搜救人員或者訓練有素的搜救犬。然而,這樣的資源非常稀缺,可能無法迅速動員足夠的人力來勘察災難現場。搜救工作極具危險性,有些地區因為風險太大,生物無法到達。
因此,很多人希望是能開發出先進的人形機器人,完完整整的替代人類的工作。因為它們能夠模仿人類的動作,使得它們在搜救和服務領域中具有很大的潛力。然而,以任務導向而言,並非所有的工作,一定要”人形”才能運作。只要能完成任務,都是好機器人。非人形機器人和仿生機器人也具備獨特的優勢。非人形機器人可以根據特定任務進行設計,例如輪式或履帶式機器人能夠在特定地形上快速移動,而飛行無人機則能在空中進行偵察。
此外,仿生機器人模仿自然界生物的特性,能在特定環境中展現出色的性能,例如模仿昆蟲的機器人可以在狹窄空間中穿梭,或模仿魚類的機器人在水下操作。這些機器人提供了靈活且高效的解決方案,能夠在危險的環境中代替人類進行搜救工作,進入人類無法到達的區域,從而大大提高搜救效率和安全性。
四足機器人開發挑戰
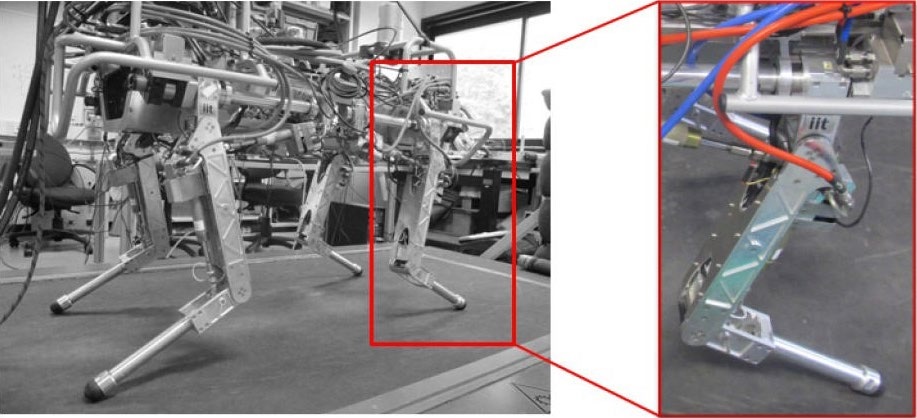
義大利技術研究院的克勞迪奧·塞米尼博士(Dr. Claudio Semini (Italian Institute of Technology))所領導的動態腿部系統實驗室(Dynamic Legged Systems Lab)所研發的四足機器人,能夠在崎嶇地形中行走、搬運重物、爬坡,甚至可以跳躍和奔跑。搜救機器人的優勢在於它們能有效補充人力搜救隊伍,快速找到受困者,並能進入人類無法到達或過於危險的地方。
然而,設計這種機器人需要慎重選擇機器人腿部的軸承和梁,因為它們的剛性會影響髖關節和膝關節所承受的力量。雖然可以透過數學方程式來解決連接的柔性問題,但這需要高度的數學技能和大量時間。隨著機器人自由度和幾何複雜性的增加,解析方法的複雜性也會急劇上升。
解決方案/驗證
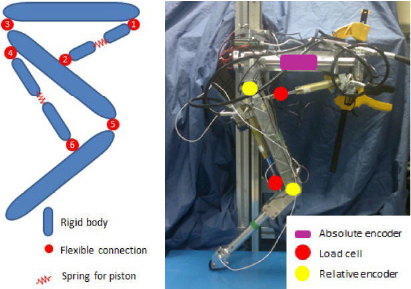
工程師們採用了Adams和MSC Nastran來模擬機器人的性能,比起傳統的解析方法,能夠在更短的時間內完成。每隻機器人腿大約有450個零件,工程師們將這些零件整合成少數幾個剛體,每個活動零組件對應一個剛體,包含滑塊、上腿、下腿、髖關節氣缸、髖樑、膝關節氣缸和膝樑。每個剛體的位置由三個參考點來決定,分別位於剛體的兩端和質心,而致動器的運動則以彈簧阻尼元件來建模。
這些元素被用來建構兩個不同的模型,差異在於剛性元素的連接方式。第一個模型稱為剛性連接原型(RCP),使用無限剛性的剛性連接來連接各元素。第二個模型稱為柔性連接原型(FCP),使用Adams的軸套元素來建立柔性連接。這兩個模型的精確性是透過跌落測試來評估。在測試開始時,機器人腿會處於平衡位置,並使用垂直導向器來保持垂直對齊。然後,再將這個機器腿提升到固定高度,放下後自由振盪。在測試過程中,使用絕對編碼器來測量滑塊的位置,並用負載傳感器來測量膝關節和髖關節的受力。為了確保結果的可靠性,這個實驗會重複進行三次。
結果
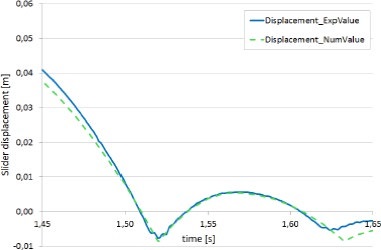
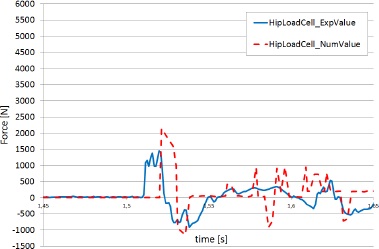
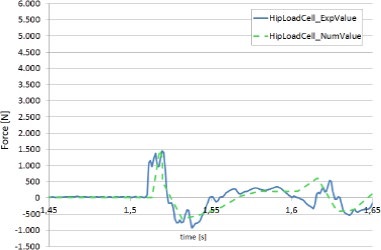
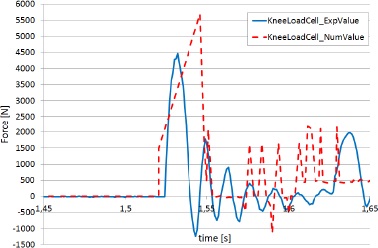
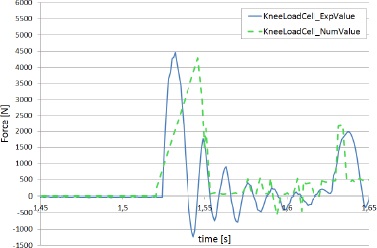
實驗結果與Adams模擬結果進行比較。在RCP模擬中,滑塊的位移與實驗結果顯示出良好的相關性。然而,模擬中預測的髖關節和膝關節的受力比實驗中實際觀察到的要高得多,這是因為RCP模型中關節的剛性設定過高。FCP模擬進行了兩種變體測試。一種變體使用四個Adams軸套元素,對應於圖中關節1、2、4和6。另一種變體則在圖中所有六個關節使用六個Adams軸套元素。FCP模擬的結果顯示,無論是在受力還是位移方面,都與實體測試結果有良好的相關性。使用四個軸套的FCP模擬在滑塊位移和髖關節受力方面與物理測試結果有極佳的相關性,但膝關節的受力不太匹配,這是因為膝關節受力預測主要依賴於關節4和5的剛性。使用六個軸套建構的模型在滑塊位移、膝關節受力和髖關節受力方面與實體測量結果具有良好的相關性。
「我們現在已經成功地建立了機器人腿部的精確模型,這意味著我們已經達成了一半的目標,能夠模擬整個機器人在各種地形上行走或奔跑的性能。」IIT先進工業自動化實驗室的負責人 Ferdinando Cannella 說:「目前,我們正在開發完整原型的模擬模型。一旦這個模型通過驗證,工程師們將開始評估多種設計替代方案,以提升機器人的性能。…」
關於義大利技術研究院
義大利技術研究院是由義大利的教育、大學與研究部以及經濟與財政部共同成立的一個基金會,目的是推動基礎與應用研究的卓越表現,並促進義大利的經濟發展。IIT的主要目標是創造和傳播科學知識,同時強化義大利在技術上的競爭力。
為了達成這些目標,IIT將與學術機構和私人企業合作,透過這些合作關係來促進科學發展、技術進步以及高科技領域的培訓。動態腿部系統實驗室專注於高性能、多功能腿部機器人的設計與控制研究,包括規劃和感知技術。扭矩控制的液壓四足機器人HyQ是該單位的旗艦平台。
原文內容: Italian Institute of Technology (IIT) – Accurately simulating a four-legged walking robot with Adams
