
以機器學習對發動機罩的行人保護性能進行快速預測。此文章內的Lunar軟體,現已改名為ODYSSEE CAE。
以AI找出最佳設計。使用Hexagon的ODYSSEE CAE軟體。
作者: 段文立,陆兴旺,罗洲,刘国平,李昂 (嵐圖汽車科技有限公司,武漢 430000)
以篇文章原為簡體中文,轉正體中文刊登。原出處請參考:
摘 要:本文對發動機罩內板傾斜角度、加強筋間距、寬度等9個幾何特徵作為參數進行行人保護頭部碰撞的DOE分析。 利用最優拉丁超立方方法得到120組數據,選取110組作為機器學習訓練集、5組作為驗證集、5組預測集。 以機器學習對加速度曲線的預測精度達到90%以上而時間成本得到數量級的提升。 透過機器學習對發動機罩的行人保護性能進行快速預測,不僅可以快速提升工作效率還可以平衡各性能矛盾。
關鍵詞:參數化;機器學習;多學科優化;行人保護 中圖
分類號:TH212;TH213.3 文獻標識碼:A
市場競爭激烈和消費理念升級決定著汽車產品需要快速反覆運算,各大主機廠都在盡量壓縮整車研發週期,以期在更短的時間內開發出更加優秀的產品。 消費端則隨著整體的消費升級,汽車由增量市場向存量市場轉化。 安全作為一個重要的競爭點,包括主動安全和被動安全兩個方面。 據歐盟國家統計,交通事故中行人的死亡率是乘員的9倍[1]。 而目前常見的較激進造型、貫穿式大燈、塑包鋼風道等以及鋁合金材料的應用,對行人保護的模擬和設計提出更多的挑戰。
無論是專案週期的壓縮還是法規更加嚴苛亦或車輛造型、材料各方面的不斷推陳出新,都給整車模擬工作提出了更大的挑戰。 這也促進整車模擬行業方法更新換代和效率的不斷提升。
1. 基於SFE的發罩概念階段性能開發
1.1 概念階段SFE參數化建模
車身總體佈置、造型和結構可行性是汽車車身在概念設計階段的主要任務,在此階段需要確定車身的基本框架結構,分析車身特徵並預測整車性能。 此階段設計的車身結構合理性及品質優劣將直接影響著整車的性能[2]。 概念階段常用的分析手段為基於隱式參數化建模工具SFE-Concept進行參數化模型搭建和性能優化[3][4]。
發動機罩板是汽車前部結構中的大鈑金件,在人-車碰撞過程中直接影響行人下肢及頭部碰撞傷害值,尤其行人頭部的損傷通常來自於與該部件的碰撞[5]。由於概念階段的前部造型不確定性和工況複雜性,發動機罩內板通常不參與前期概念設計。更多是工程數據發佈后,基於單一或多工況進行經驗優化,導致優化空間有限。 為大幅提升車輛的行人安全性能,需在車輛概念設計階段引入行人安全性能指標指導其結構優化設計工作,實現面向行人保護的車身結構整體優化設計。
由於概念階段沒有完整的CAD數據輸入,本文使用 SFE-Concept進行發動機罩的全參數化建模。 該方法基於主要斷面、發罩與車身分縫、造型及總佈置數據進行發動機罩模型搭建。
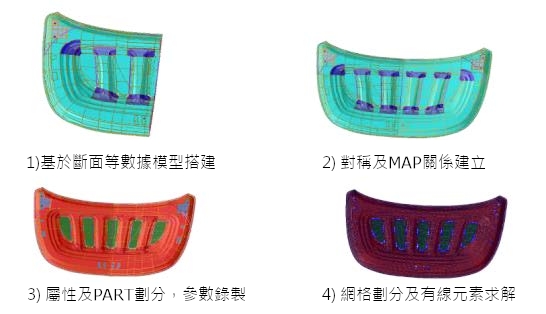
基於該參數化模型,在考慮整車造型等方面確定的前提下,能優化的更多是內板的結構形式。 根據布
置等需求,挑選內板傾斜角度、加強筋間距、寬度等作為參數化研究對象,具體參數如圖 2:

其中內板前後端腔體大小變化(傾斜角)分別創建 2 個變數;主筋高度為 1 個變數;主筋間距為 2 個變數;主筋寬度為2個變數(左右對稱);共計9個形狀變數。 基於這九個變數,考慮到各變數之間的互相干擾等因素,採用最優拉丁超立方方法進行 DOE(實驗設計)分析,共計劃分 120 組發動機罩CAE 模型裝配後進行行人保護頭碰分析。
1.2 SFE模型與CAE模型模擬及對標
模擬模型建立的精度在很大程度上決定分析結果的精度,因此建立一個適用於行人保護分析的具有較高可信度和精度的有限元模型是整個分析工作的基礎[9]。 因此需要對SFE搭建的參數化模型精度進行對標分析。
行人保護頭部碰撞分析建模需滿足各主機廠的整車CAE模擬網格建模規範和整車碰撞模型CAE搭建設計規範要求。 分析模型主要包括:車身、外飾、動力總成、電子電器,所有總成內部及總成之間按照定義的連接方式連接。 網格模型沒有穿透。
頭部碰撞速度設置35Km/h,在兒童頭部碰撞區域,衝擊角度為50°,在成人頭部碰撞區域,衝擊角度為 65°。 行人保護車體模型為整車模型中B柱前車體結構模型,對邊緣有限元節點進行自由度約束,對行人保護頭部碰撞分析模型施加Z向重力載荷,載荷大小為9.81N/kg。
行人保護頭部碰撞點必須在行人保護頭部碰撞區域內選擇,根據頭部碰撞方向選擇具有潛在風險的位置,主要為鉸鏈區域、雨刮軸區域、前大燈區域、翼子板與機罩分縫線區域、前保與翼子板分縫線區域等,其他區域均勻選點,如圖3。 碰撞點應為頭部模型與車體模型的接觸點。

本文考慮到 DOE 分析模型數量和硬體需求,僅選擇發罩本體(即不包含前保、車身、前機艙等結構)作為分析對象,頭部模型僅選擇兒童頭進行對標。
考慮對稱性及撞擊點位於發罩上,選擇位於發罩上的左側 76 個點進行模擬分析。 為了加強對比性,選擇位於內板加強筋部位的 57 號點和 76 號點對比如下:
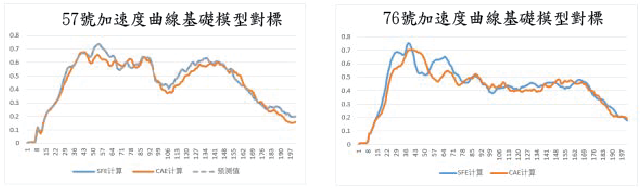
SFE 參數化模型與傳統 CAE 網格模型的加速度曲線對比精度滿足模擬需求,達到 90%以上。 因此可以利用該 SFE 參數化模型進行頭部碰撞分析。
2. 基於機器學習的加速度曲線預測
2.1 機器學習
SFE參數化模型搭建的頭碰模型精度達標后,對 DOE分出的120組模型分別計算。 本章將通過機器學習演算法對加速度曲線和HIC值進行學習及預測。
機器學習(ML)是人工智慧(AI)的一個分支,是一種數據分析技術,其利用計算及通過數學模型學習數據樣本的規律,以此尋找問題的解決方案[6]。 這與利用物理模型來解決問題的思路不同,針對傳統的物理模擬模型,需要考慮的是模型精度、邊界和初值條件以及有限元模型搭建過程中的近似合理性等。 而機器學習的解決方案立足於數據樣本和數學模型,學習的結果主要受到數據樣本的質量和數量影響。
ML按照學習方式進行分類包括監督式學習、半監督式學習、無監督式學習及強化學習。 其中監督式學習要求提供標註的樣本集;半監督式學習要求提供少量標註的樣本集,無監督式學習不需要提供標註的樣本集,而強化學習則要求提供獎懲反饋機制。 本文使用監督式機器學習,其根據輸出可以是連續的值稱為回歸問題,或是一個分類標籤稱為分類問題。
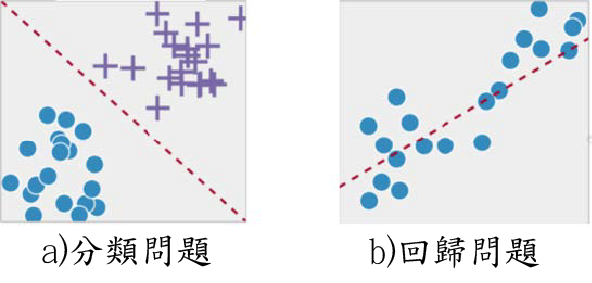
監督式學習方法會根據所提供的數據樣本里的輸入輸出來訓練模型,讓模型能夠基於新的輸入預測輸出[8]。 其流程如下:

首先收集原始數據樣本並做數據分析,基於分析結果對數據進行預處理,如數據清理和特徵工程等,確保數據滿足後續訓練模型的輸入要求,提高對預測目標的相關性,使得模型的優化步驟更容易。 然後根據學習目的選擇具體適當的模型。 本文的加速度曲線是個回歸問題,供選擇的模型方法有神經網路、高斯回歸過程等[7]。 基於模型對之進行調參及訓練。 最後使用訓練好的模型對新的輸入進行預測輸出。
2.2 加速度曲線預測
如前文所述,僅選取發動機罩左側對稱的76個撞擊點進行模擬分析,每個點包含120個參數組合樣本點。 為了提升訓練集樣本點數量選擇其中110組作為訓練集,5組作為驗證集,5組為預測集。
基於LS-DYNA碰撞分析得到的結果數據大小很大,總計包含120*76=9120個.d3plot格式檔,需要將所有結果對應曲線數值輸出為. CSV格式。 這裡採用 Python對其進行基於META軟體的二次開發,可以一次性輸出9120個CSV檔。
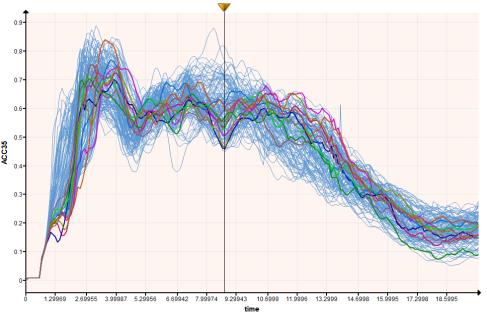
對加速度曲線進行學習,首先對數據進行處理,包括訓練集的X和Y軸。 X軸為9個參數DOE參數取值分佈,為9*110的陣列,其中9為9個參數變數,110為訓練集對應的110組參數取值。 Y軸為每個撞擊點對應的 110條曲線,其陣列大小為110*201,其中201為模擬過程中數據採集的頻率有關,每條曲線包含201個數據點。
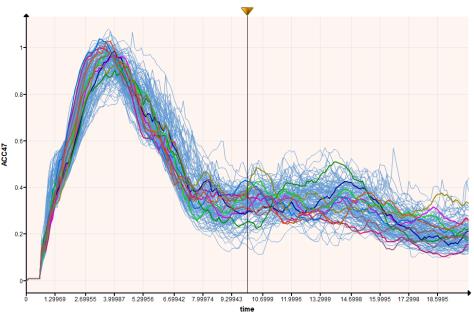
Lunar軟體作為一個可以同時對數據、曲線和三維動畫進行機器學習的軟體,這裡選擇其曲線功能。 而且可以通過擴展一次性對76個碰撞點曲線進行學習。 經過軟體的學習和訓練過程,選擇兩種不同位置的曲線進行精度驗證。 其中35號點位於內板加強筋位置,內部參數變化較大110條曲線分佈亦較為發散;47號點位於發罩邊緣處,參數變化對其加速度影響較小,其110條加速度曲線相對收斂。 如下圖所示:
Lunar軟體可以在一分鐘的時間內完成76組110條曲線的訓練,對於新的參數組合的預測速度將在秒數量級完成。 對這兩個點位,隨機選擇35號點的113組驗證組數據和47號點的114組驗證組數據進行驗證,其結果如下:
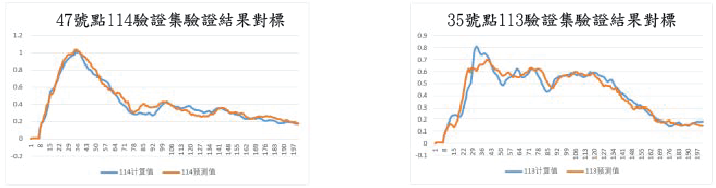
P35 和 P47 加速度的驗證精度很高,但 P47 精度明顯高於 P35,說明訓練集數據質量對於採用相同訓練模型和參數的訓練精度具有影響,數據越發散其預測精度越低。
在驗證集精度相對較高的前提下,對預測集進行預測如下:隨機選擇P35的119組參數和P47的117組參數對應的加速度曲線預測如下:
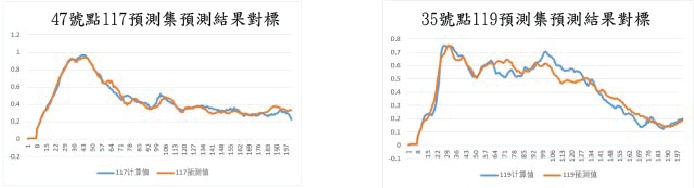
預測集加速度曲線預測結果和驗證集精度一致。 碰撞分析作為高度非線性的分析工況,其預測精度可以達到90%以上。 其對比優化軟體的近似模型的精度要高很多。 同時機器學習能夠在極短的時間內(秒級)對加速度曲線預測並達到相當高的精度。 通過對加速度曲線的機器學習證明瞭其在項目實施中的可行性,為未來項目開發提供一種極大程度節省時間成本的方法和可能。
3. 總結及展望
本文基於參數化和機器學習手段,對發動機罩的整個開發流程進行全流程的數值優化工作,其創新點主要體現在如下幾個方面:
- 在概念階段藉助於 SFE-Concept 參數化建模,可以更早的介入發罩開發,對於造型、性能等決策提供性能支撐;
- 使用機器學習方法可以快速預測加速度和 HIC 值,而且精度達到 90%以上,這樣可以極大程度提高模擬和開發效率。
整車開發專案中採用機器學習方法,模擬效率的提升效果非常明顯。 其對項目開發週期和性能平衡具有很好的促進作用。
對於碰撞安全、約束系統和行人保護作為高度非線性的工況,具有模擬精度相對低和計算量大等現實困難。 借助 Lunar 軟體機器學習方法,不僅可以提高模擬效率;同時其可以對曲線、動畫等進行學習,對於直觀的瞭解碰撞狀態具有非常大的意義。
参考文獻
[1] 黄伟.行人和成員下肢生物力學損傷分析與應用[D].華南理工大學,2016.
[2] 季枫.白車身參數化建模與多目標輕量化優化設計方法研究[D].吉林大學,2014 年。
[3] 张峰,段文立,刘杨胜,石荡赫,陈渝祺.平台架構概念設計 階 段 車 身 結 構 優 化 方 法 [J]. 重 慶 大 學 學 報 , 2021,44(12):54-70.
[4] 王登峰,蔡珂芳,马明辉,张帅.基於隱式參數化模型的白車身輕量化設計[J].汽車工程,2018,40(5):610-616.
[5] 王萍.面向行人保護的汽車前端結構參數化優化設計[D].重慶大學,2020 年.
[6] 何清,李宁,罗文娟,史忠植.大數據下的機器學習演算法綜
[7] 述[J].模式識別與人工智慧,2014 年 4 月,第 27 卷第四期.
[8] 吴远波,王海波,林成靖.機器學習在汽車領域的應用場景及展望[J].2021 中國汽車工程學會年會論文集.
有興趣了解聲學和變速箱模擬嗎? 這裡有更多Actran和Romax Spectrum的介紹。
